Robotics @ University of Michigan
📍 Ann Arbor, MI, US
● Building Intelligent Systems
I'm Ashrith Edukulla, an undergraduate studying Robotics Engineering at the University of Michigan. I love building robotic systems end-to-end — from low-level embedded firmware to dynamics, planning, and full autonomy.
My main interests are control, motion planning, SLAM, embedded systems, and building real robots that actually work in the real world. This semester I’m diving deep into ROB 415 (Control), ROB 320 (Planning & ROS2), ROB 330 (Localization & Mapping), and EECS 281 (DSA) — a combination that lets me connect the math, algorithms, and implementation behind modern robotic systems.
I’ve worked on a range of projects: a motion-sensing robotic limb with real-time IMU-based finger control, FROST — an autonomous black-ice detection robot, SLAM and exploration on the MBot platform, and embedded control firmware for the Michigan Mars Rover using STM32 and ROS. At the Synergic Adaptive Machinas (SAM) Lab, I’m researching swarm robotics under Prof. Steven Ceron — developing a 9-motor control system and UI for programmable micro-robot collectives.
I’m always trying to bridge theory and implementation: modeling dynamics in MATLAB/Julia, writing C++ for embedded control, debugging hardware at 2 AM, and building systems until they behave exactly the way I want. I’m always open to collaborating on cool robotics ideas — if you’re working on something interesting, let’s connect!
University of Michigan, Ann Arbor
B.E. in Robotics Engineering — GPA: 3.96 / 4.0
📍 Ann Arbor, MI, United States
📅 Aug 2024 – Dec 2026
Honors & Awards: Ranked 3rd in World Robotics Olympiad • 4× Medalist at International Youth Robotics Contest • 3× AMC Qualifier • 2× AIME Qualifier
Current (Fall 2025): ROB 415 (Control of Robotic Systems), ROB 320 (Planning & ROS Integration), ROB 330 (Localization & Mapping), EECS 281 (Data Structures & Algorithms)
Completed: Circuit Design, Robot Optimization, Simultaneous Localization & Mapping, Linear Algebra, Robotic Differential Equations
📍 Weston, FL / United States
May 2026 – Aug 2026
Incoming Robotics Software Engineering Intern
📍 University of Michigan, Ann Arbor, MI
Jan 2026 – May 2026
Instructional Aide
📍 University of Michigan, Ann Arbor, MI
Jan 2026 – Present
Undergraduate Researcher — Perception & Planning
📍 University of Michigan, Ann Arbor, MI
Aug 2025 – Dec 2025
Undergraduate Researcher
📍 University of Michigan, Ann Arbor, MI
Aug 2025 – Dec 2025
Instructional Aide
📍 Ann Arbor, MI, United States
Nov 2024 – May 2025
Embedded Software Engineer
📍 Remote / India
Apr 2023 – Jul 2023
Robotics Assistant Intern
📍 India
Sep 2022 – May 2023
Founder & Organizer
Built an autonomous-vehicle localization pipeline using IEKF sensor fusion (IMU + wheel odometry + GNSS + stereo/mono VO + LiDAR), with map-based corrections for drift-bounded pose tracking.
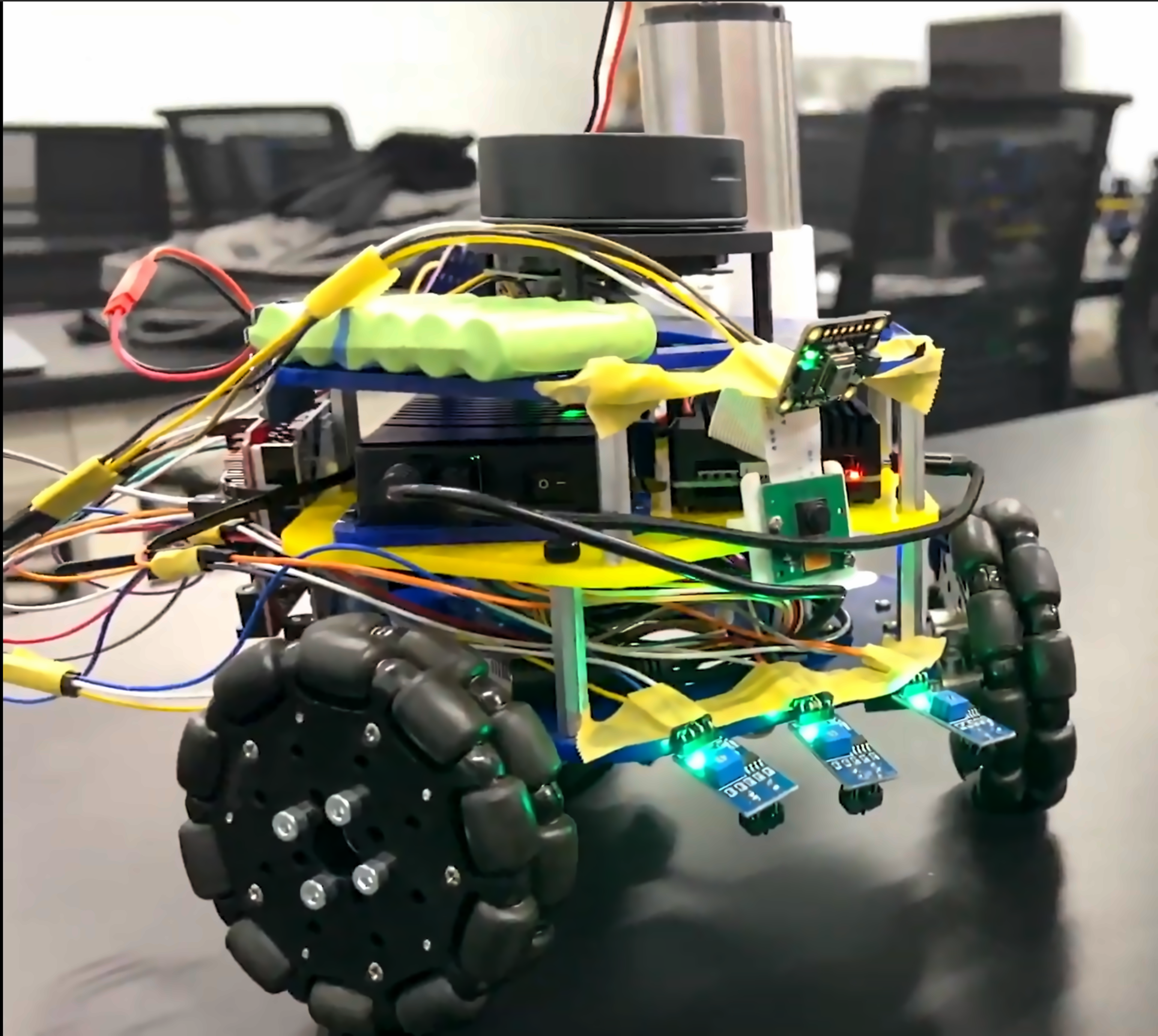
Implemented full SLAM on the MBot platform: laser-based localization, occupancy-grid mapping, and autonomous exploration using frontier detection and path planning.
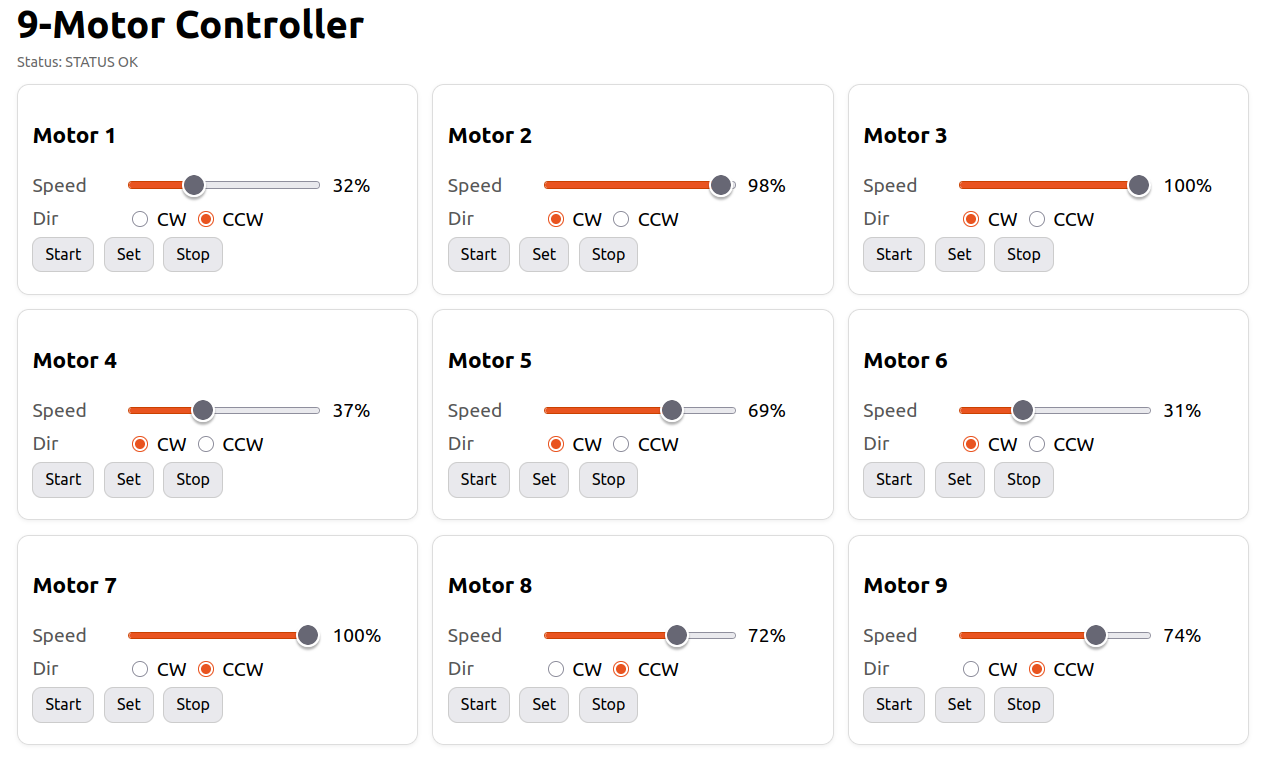
Building a C++ HTTP + serial bridge and browser-based UI to control a 9-motor array for swarm robotics experiments, with per-motor speed/direction control, real-time feedback, and preset motion patterns.
MATLAB-based dynamic simulation of a realistic humanoid leg, modeling joint torques, ground contact, and human-like gait to study control and energy usage.

Built an accelerometer-based robotic limb with precise real-time finger control and motion sensing.
Black ice detection robot using sensor fusion, alerts pedestrians using LEDs + audio module.

Solar-powered robot that waters plants on highway medians using a robotic arm.
Developed a dual-energy harvesting system from pressure and heat to power EV batteries autonomously.

Created an agricultural robot to plough, sow, water, and accelerate indoor crop growth via artificial light.
Languages
→ C++, Python, Julia, MATLAB
Software & Dev Tools
→ Linux, Git, CMake, VS Code Remote, gdb, memory debugging, profiling
Algorithms & Data Structures (EECS 281)
→ Graph algorithms, shortest paths (Dijkstra, A*), dynamic programming, greedy methods, priority queues, balanced trees, hash maps, recursion, STL
Version Control & Collaboration
→ GitHub, project branching, CI-style builds, code reviews, reproducible builds
Frameworks & Platforms
→ ROS 2, RViz, Gazebo/Isaac Sim, colcon build, rosbag, transforms (tf2)
Hardware & Interfaces
→ Arduino, STM32, I²C, PWM, encoders, IMUs, sensor fusion integration
Planning & Integration (ROB 320)
→ Motion planning pipelines, collision checking, sampling-based planners (RRT), occupancy grids, action models, ROS middleware, node graph design
Robot Development
→ Embedded control, actuator tuning, hardware bring-up, real-time debugging
Control & Dynamics (ROB 415)
→ State-space modeling, linearization, controllability/observability, PID tuning, LQR, feedback linearization, transfer functions, stability analysis
Localization & Mapping (ROB 330)
→ Particle filters, Bayes filters, sensor models, inverse sensor models, coordinate transforms, odometry, Kalman filtering, mapping, probabilistic robotics
Planning & Robotics Algorithms
→ Graph search (A*, D*), RRT, occupancy mapping, path smoothing, trajectory generation, cost functions, multi-step prediction
Analytical & Computational Methods
→ Linear algebra, ODEs/PDEs, optimization, numerical solvers, eigenanalysis, Jacobians, least-squares estimation
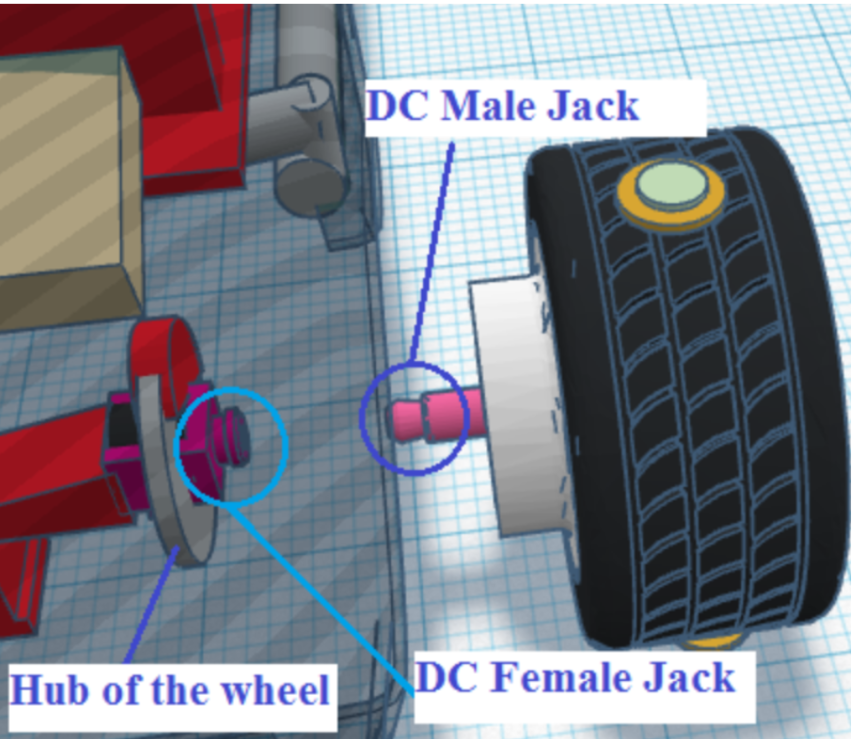
Mechanical & CAD Design
→ SolidWorks, linkages & joint modeling, robot chassis design, motion visualization, kinematics modeling
System Integration
→ Hardware–software synchronization, performance tuning, testing workflows, reproducible experiments, robotics pipelines
Developed a piezoelectric energy harvesting system to convert automobile pressure into electricity for powering electric vehicles.
🏅 1 Gold, 2 Silver, 1 Bronze
2× USAMO Qualifier, 3× AIME Qualifier
Qualified for the USAMO (top 300 of 300,000 globally). AIME distinction holder across 3 years.
I'm always excited to connect with fellow innovators, collaborators, or just curious minds. Let's build something awesome together!
📧 Email: ashed@umich.edu
📞 Phone: (248) 734-3391
💼 LinkedIn: ashrith-edukulla
📄 Resume: View Resume